A 'Hello World' for PyTorch
![]()
PyTorch is a powerful machine learning library and is becoming the dominant deep learning framework. I want to learn how to use PyTorch, so in the spirit of “Hello World”-like programs, the first thing I wanted to do is create a small neural network and train it on an easy dataset. The PyTorch tutorial creates a fully connected neural network to train on FashionMNIST, but I want something even simpler so when things go wrong I’ll know that I’ve made a mistake somewhere.
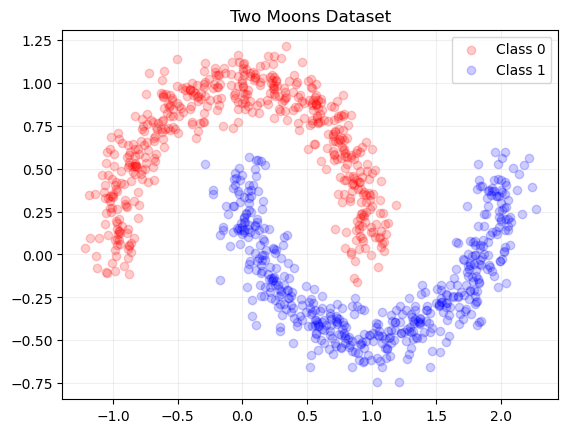
For this experiment, I’ll create a network of a few fully connected layers to classify the two moons dataset. I’ve chosen this dataset because the data is easily visualized and the optimal decision boundary is both non-linear and obvious on inspection.
Load Libraries
# Load libraries
import matplotlib.pyplot as plt
import numpy as np
from sklearn.datasets import make_moons
import torch
from torch import nn
Check for GPU
# check that GPU is recognized
print("Does PyTorch recognize the GPU?","Yes" if torch.cuda.is_available() else "No")
device="cuda" if torch.cuda.is_available() else "cpu"
Does PyTorch recognize the GPU? Yes
The Dataset: Two Moons
The first step is to investigate the toy dataset. The two moons dataset has one adjustable parameter, noise, which determines the spread of both half-moons. I’ve set noise=0.1 so there are some values from each class that are very close at one end of each half moon. Even with this noise, the data appears separable such that a converged network should reach near 100% accuracy.
Generate Two Moons Dataset
# Generate the Two Moons dataset
x_data, y_data = make_moons(
n_samples=1000,
shuffle=True,
noise=0.1,
random_state=42
)
Plot Two Moons Dataset
# Plot the Two Moons dataset
class_colors = ["red", "blue"]
for i in range(len(np.unique(y_data))):
plt.scatter(
x_data[y_data == i, 0],
x_data[y_data == i, 1],
color=class_colors[i],
alpha=0.2,
label="Class "+str(i)
)
plt.grid(alpha=0.2)
plt.legend()
plt.title("Two Moons Dataset")
plt.show()
Construct PyTorch Model and Dataset For Training
Make Network
The simplest way to construct a neural network in PyTorch is with the Sequential container and torch.nn modules. This is one of three ways to construct a neural network in PyTorch. The network graph is defined by the order of the modules passed into nn.Sequential.
The below model takes in the x and y values of two moons data set then has three fully connected hidden layers, with 20, 20, and 20 nodes respectively. A ReLU activation is used, followed by a one dimensional batch normalization. The final output could either be a one-hot encoding or a logistic regression to value where values greater than 0.5 are classified as 1 and values less than 0.5 are classified as 0 . I’ve chosen the logistic regression option.
Define PyTorch Network in Sequential Container
# Define a neural network
model = nn.Sequential(
nn.Linear(2, 20),
nn.ReLU(),
nn.BatchNorm1d(20),
nn.Linear(20, 20),
nn.ReLU(),
nn.BatchNorm1d(20),
nn.Linear(20, 20),
nn.ReLU(),
nn.BatchNorm1d(20),
nn.Linear(20, 1),
nn.Sigmoid()
)
model.to("cuda")
print(model)
print("Number of trainable parameters:", sum(p.numel()
for p in model.parameters() if p.requires_grad))
Sequential(
(0): Linear(in_features=2, out_features=20, bias=True)
(1): ReLU()
(2): BatchNorm1d(20, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(3): Linear(in_features=20, out_features=20, bias=True)
(4): ReLU()
(5): BatchNorm1d(20, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(6): Linear(in_features=20, out_features=20, bias=True)
(7): ReLU()
(8): BatchNorm1d(20, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(9): Linear(in_features=20, out_features=1, bias=True)
(10): Sigmoid()
)
Number of trainable parameters: 1041
Create Dataset and DataLoader
Next extend the Dataset class for the two moons dataset and create a DataLoader object. The extension of Dataset class must define a __len__ function which returns the number of samples and a __getitem__ function which returns an instance given an index. The DataLoader is a utility for iterating over the dataset. I’ve defined the minibatch size as 100, which is 10% of the 1000 instances of the two moons dataset. An enumerated DataLoader will provide one batch per iteration.
Create Dataset and DataLoader
class TwoMoons(torch.utils.data.Dataset):
def __init__(self, x_data, y_data):
self.X = torch.from_numpy(x_data).to(device)
self.Y = torch.from_numpy(y_data).to(device)
def __len__(self):
return len(self.Y)
def __getitem__(self, idx):
return [self.X[idx], self.Y[idx]]
# Create the training data as a DataLoader Object
two_moons = TwoMoons(x_data, y_data)
train_data = torch.utils.data.DataLoader(two_moons, batch_size=100)
Define Objective Function and Optimizer
To train a network, a loss/objective function needs to be defined. This is the mathematical function which the network is trying to minimize. Since the above network is a regression problem, a mean squared error loss MSELoss() is an appropriate choice. This loss is minimized by the optimization algorithm, which takes the current predictions of the network and updates the model parameters. PyTorch has many optimization algorithms, but I’ve used stochastic gradient descent or SGD.
Define Loss Function and Optimizer
# Define Loss Function and Optimizer
loss_function = nn.MSELoss()
optimizer = torch.optim.SGD(model.parameters(), lr=1e-1, momentum=0.9)
Weight Initialization
Parameters in the network are initialized with reasonable defaults determined by PyTorch. For example, the nn.Linear module’s parameters are initialized from a uniform distribution (-$\sqrt{k}$,$\sqrt{k}$), where $k$ is the inverse of the number of input features to the layer. When training a network, the trainable parameters will change as the network learns. I found it helpful to be able to reset all the weights when experimenting, especially in combination with setting the default random seed. Resetting the network weights can be achieved by the reset_parameters() method for trainable modules (in this case the nn.Linear and nn.BatchNorm1d layers). By using the apply method of the Sequential container, the weights of each layer can be reset with below function:
Create helper function for resetting weights
def init_weights(model):
def reset_weights(m):
if isinstance(m,nn.Linear) or isinstance(m,nn.BatchNorm1d):
m.reset_parameters()
model.apply(reset_weights)
Train the Model
With a network, loss function, optimization method, and a way to handle the data, we can begin to train the network. This is divided into two main steps, initialization and training.
- Initialization
-
Determine how long to train. In this case, I train for 10 epochs. Alternatively could train until certain loss is achieved. An epoch is a full pass through the training data. Based upon how I set up the
DataLoader, one epoch consists of 10 mini-batches. In each mini-batch, a noisy estimate of the loss (noisy since only calculated on a fraction of the training data) is calculated and used to update the model weights. Many machine learning tasks are non-convex optimization problems, where a noisy estimate of the loss often outperforms the true loss since it can escape local minima in the loss function. - Set the random seed. When things go wrong, it is helpful to remove the RNG from what is happening. Each random seed will give different initial weights to the network and therefore different initial accuracy+decision boundary.
- Initial performance of Model. With weights initialized, test the accuracy of the model. On average expect this to be around 50% for binary classification, but will be off based on network architecture and initial weights.
-
Determine how long to train. In this case, I train for 10 epochs. Alternatively could train until certain loss is achieved. An epoch is a full pass through the training data. Based upon how I set up the
- Training
- Zero the gradients. By default the gradients are accumulated in a buffer, so need to zero them out so back propagation is calculated correctly.
- Make prediction and calculate loss. Network output is calculated by passing the input values directly to the model object. These predictions and the true values are then passed to the loss function, giving the loss for the mini-batch.
-
Back Propagation. With a loss, we can calculate the gradient of the network with
.backward(). After the gradient is calculated, the optimizer can update the weights of the network with the.step()method.
Initialize and Train the Model
# 1. Initialization
num_epochs = 10
torch.manual_seed(42)
init_weights(model)
loss_history = np.zeros((num_epochs))
accuracy_history = np.zeros((num_epochs))
initial_preds = model(two_moons.X.float())
initial_loss = loss_function(initial_preds, two_moons.Y.unsqueeze(1).float())
initial_acc = torch.eq(initial_preds.squeeze(
1).round().bool(), two_moons.Y.bool()).sum()
print(f"Initial Loss: {initial_loss}")
print(f"Initial Accuracy: {initial_acc/len(two_moons)} \n")
#2. Learning
for epoch in range(num_epochs):
running_loss = 0
num_correct = 0
total_samples = 0
for i, (inputs, targets) in enumerate(train_data):
optimizer.zero_grad()
predictions = model(inputs.float())
loss = loss_function(predictions, targets.unsqueeze(1).float())
loss.backward()
optimizer.step()
running_loss += loss.item()
num_correct += torch.eq(predictions.squeeze(1).round().bool(),
targets.bool()).sum()
total_samples += targets.size(0)
loss_history[epoch] = running_loss/len(train_data)
accuracy_history[epoch] = num_correct/total_samples
print(
f"Epoch: {epoch+1:02d}/{num_epochs} | Loss: {loss_history[epoch]:.5f} \t | Accuracy: {accuracy_history[epoch]:.5f}")
Initial Loss: 0.25068870186805725
Initial Accuracy: 0.5560000538825989
Epoch: 01/10 | Loss: 0.09092 | Accuracy: 0.88900
Epoch: 02/10 | Loss: 0.01654 | Accuracy: 0.98800
Epoch: 03/10 | Loss: 0.00792 | Accuracy: 0.99200
Epoch: 04/10 | Loss: 0.00350 | Accuracy: 0.99700
Epoch: 05/10 | Loss: 0.00244 | Accuracy: 0.99800
Epoch: 06/10 | Loss: 0.00178 | Accuracy: 0.99800
Epoch: 07/10 | Loss: 0.00155 | Accuracy: 1.00000
Epoch: 08/10 | Loss: 0.00136 | Accuracy: 0.99900
Epoch: 09/10 | Loss: 0.00119 | Accuracy: 1.00000
Epoch: 10/10 | Loss: 0.00133 | Accuracy: 0.99800
Inspect Model Results
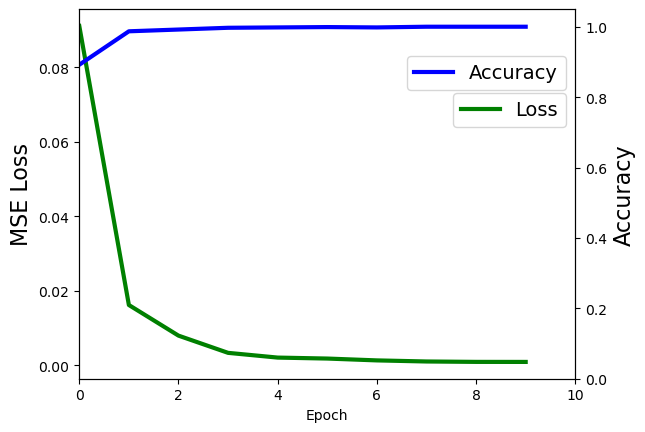
In addition to training, I’ve kept track of the model accuracy (correct predictions) and the model loss (mean squared error) across each epoch. The network converges to an optimal solution very quickly, reaching 98.8% accuracy after just two epochs.
Plot Loss and Accuracy Curves
# Plot the Loss History and the Accuracy
# Plot the Loss and Accuracy History
fig, ax1 = plt.subplots()
ax2 = ax1.twinx()
ax1.plot(range(num_epochs), loss_history, 'g-', linewidth=3, label="Loss")
ax2.plot(range(num_epochs), accuracy_history,
'b-', linewidth=3, label="Accuracy")
ax1.set_xlabel("Epoch")
ax1.set_ylabel("MSE Loss", fontsize=16)
ax2.set_ylabel("Accuracy", fontsize=16)
ax2.set_ylim([0, 1.05])
ax1.set_xlim([0, 10])
ax1.legend(bbox_to_anchor=(1, 0.8), fontsize=14)
ax2.legend(bbox_to_anchor=(1, 0.9), fontsize=14)
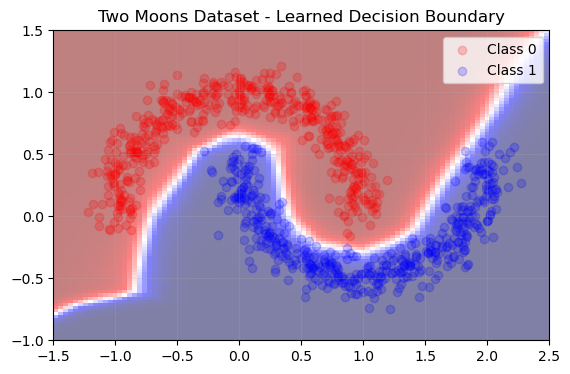
Additionally, by making predictions for a grid of points, we can visualize the decision boundary learned by the network. I’ve found that the decision boundary between regions where there is training data is similar across random seeds. However, the decision boundary outside of this distribution changes based on the random seed/initial state of the network. This highlights a (potential) weakness of neural nets, as they can perform poorly on data out of their training distribution.
Plot Decision Boundary
# Plot the scatter plot and the decision boundary
x0_grid = np.linspace(-1.5, 2.5, num=100)
x1_grid = np.linspace(-1, 1.5, num=100)
pred_grid = torch.from_numpy(np.array(np.meshgrid(x0_grid, x1_grid)))
pred_grid = pred_grid.to("cuda")
pred_array = torch.transpose(
torch.reshape(pred_grid, (2, pred_grid.shape[1]*pred_grid.shape[2])), 0, 1
)
def makeGridPrediction(model, pred_array):
model_array_preds = model(pred_array.float())
model_grid_preds = torch.flip(
torch.reshape(
torch.transpose(model_array_preds, 0, 1),
(pred_grid.shape[1], pred_grid.shape[2])
),
[0])
return model_grid_preds.cpu().detach().numpy()
plt.imshow(
makeGridPrediction(model, pred_array),
extent=[x0_grid[0], x0_grid[-1], x1_grid[0], x1_grid[-1]],
cmap='seismic_r',
alpha=0.5)
# Plot the data again
class_colors = ["red", "blue"]
for i in range(len(np.unique(y_data))):
plt.scatter(
x_data[y_data == i, 0],
x_data[y_data == i, 1],
color=class_colors[i],
alpha=0.2,
label="Class "+str(i)
)
plt.grid(alpha=0.2)
plt.legend()
plt.title("Two Moons Dataset - Learned Decision Boundary")
plt.show()
Check Network Evolution
The evolution of the network can be visualized for this toy dataset by plotting the decision boundary for each mini-batch. Also, the impact of random weight initialization can be seen by the two different decision boundaries for the first mini-batch.